Este aparato estaría posicionado en la mascarilla, y detecta a la distancia a la que están otros dispositivos iguales. La distancia de seguridad mínima son dos metros, si se está a esa distancia, una luz verde de nuestro dispositivo estará encendida y el indicador marcará un "Ok" o "Distancia Correcta" nosotros podremos ver el brillo del LED y otras personas podrán ver nuestro indicador. Si estamos a poco más de 2 metros de distancia, se encenderá un LED amarillo y la aguja del indicador cambiará y nos advertirá que debemos tener cuidado, pues es probable que nos acerquemos demasiado a alguien. Si se detecta a otra persona a menos de 2 metros, un LED rojo se encenderá y en el indicador podremos ver señalado un mensaje cómo "Demasiado cerca" o "Distancia mínima sobrepasada".
Gracias a este dispositivo, reduciremos el número de contagios.
El montaje de este proyecto es ligeramente más complicado que los anteriores, pues es la combinación de varios trabajos.

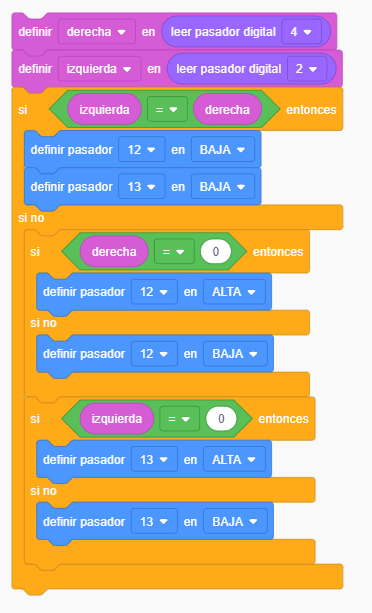
El código de bloques también es algo largo, pero no demasiado complejo.

Para la programación por bloques, sólo tenemos que hacer lo mismo que hicimos a la hora de hacer un sensor de ultrasonidos pero, añadiendo la orden que hace que el servomotor se mueva en las diferentes situaciones.
Sensor de ultrasonidos: https://tecnoesocity.blogspot.com/2020/04/practica-304-sensor-de-ultrasonidos.html
Para que veáis cómo funciona, aquí os dejo un vídeo.
Y este es el final de la presentación de este proyecto, espero que os haya gustado y, cómo aún no tenemos este dispositivo, debéis cuidar vosotros las distancias.
¡Hasta pronto!